This work is the collaboration result between ROVIS and Elektrobit Automotive.
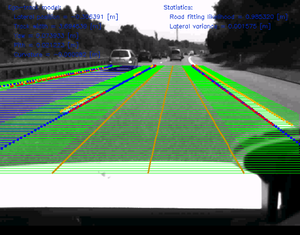
In this work, a road structure estimation system, capable of robustly segmenting and tracking lanes imaged using a camera mounted on a vehicle, has been developed. The algorithm is based on a camera calibration procedure that is able to calculate in real-time de roll, pitch and yaw of the vehicle. Further, the method is able to compute not only the ego-lanes, on which the car is driving, but also the neighbouring lanes.
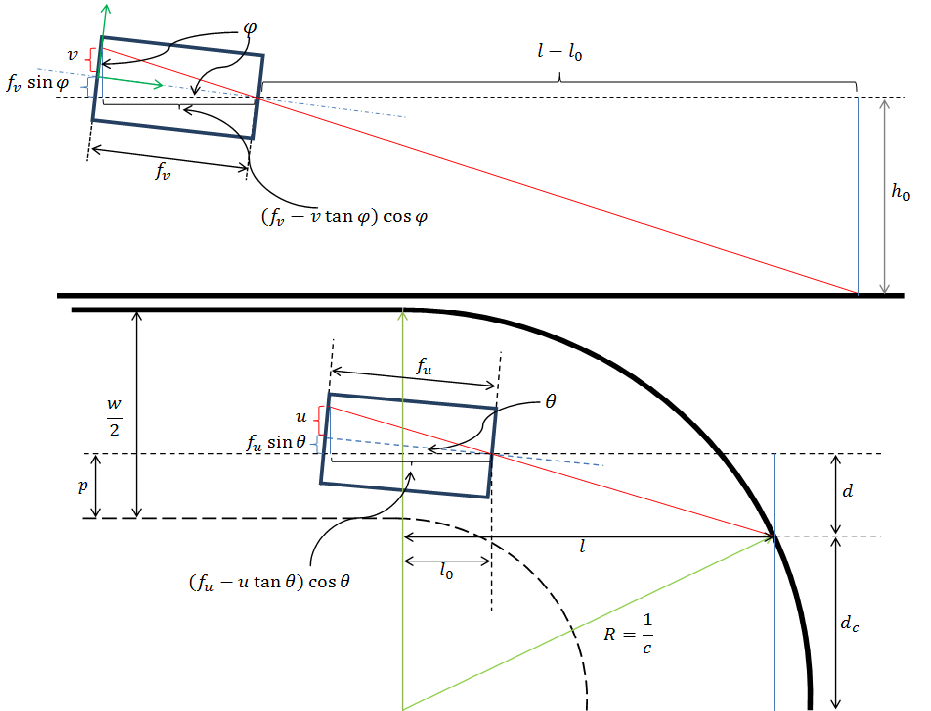
Fig. 1. Mathematical model of the road.
Mathematically, the road model depicted in Fig. 1 can be represented as a 5-element vector:
where is the pitch angle and it measures the rotation around the X axis,
is the yaw angle and it measures the rotation around the Y axis,
is the lateral offset between the middle of the ego-track and the middle of the ego-vehicle,
is the track width, defined as the distance between the left and right lines of a lane and
is the curvature of the track. First of all, a correspondence between real world
coordinates and image
coordinates needs to be determined.
From the two similar right triangles that have a red hypotenuse, blue and dashed black sides, the following equation can be deduced:

Since the pitch angle is considered small, the following simplifying assumptions can be made:
Thus, a simple vertical coordinate transformation is obtained:
Thus, a simple vertical coordinate transformation is obtained:
Under the assumption that the look-ahead distance is much smaller than the radius of curvature of the lane , the square root could be approximated by:
Therefore the approximate lateral distance is:
Next, the two similar right triangles in the image that have red hypotenuses and blue opposite sides are considered, obtaining:
Again, similarly to the vertical projection case, the yaw angle is considered to be small, leading to:
Thus:
References
Ernst D. Dickmanns and Birger D. Mysliwetz "Recursive 3-D Road and Relative Ego-State Recognition", IEEE Trans. on Pattern Analysis and Machine Intelligence, vol. 14, no. 2, February 1992.