Prof. Dr.-Ing. Sorin Grigorescu
Head of the ROVIS Laboratory
Transilvania University of Brasov
s.grigorescu@unitbv.ro
Prof. Dr. Sorin Mihai Grigorescu received the Dipl.-Eng. Degree in Control Engineering and Computer Science from Transilvania University of Brasov, Romania, in 2006, and the Ph.D. degree in Robotics from the University of Bremen, Germany, in 2010. Between 2006 and 2010 he was a member of the Institute of Automation, University of Bremen, where he coordinated the FRIEND service robotics project. Since June 2013 he is affiliated with Elektrobit Automotive, where he is the Country Technical Lead. Sorin is also a professor at the Department of Automation, Transilvania University of Brasov, Romania, where he leads the Robust Vision and Control Laboratory. He was an exchange researcher at several institutes, such as the Intelligent Autonomous Systems Group (Technical University Munich), the Robotic Intelligence Lab in University Jaume I, Spain, the Department of Information Technology, Széchenyi István University, Gyor, Hungary, or Korea Advanced Institute of Science and Technology (KAIST), South Korea.
Since August, 2010: Head of ROVIS Lab at the Institute of Automation, Transilvania University of Brasov, Romania.
Since July, 2021: Country Technical Lead, Elektrobit Automotive Romania.
January, 2018 - June 2021: Head of Artificial Intelligence, Elektrobit Automotive.
June, 2013 - December 2017: Team manager - Navigation and Driver Assistance Domains, Elektrobit Automotive Romania.
June 2009 - 31 July 2010: Head of the FRIEND project at the Institute of Automation, University of Bremen, Germany.
November 2006 - 31 July 2010: PhD student at the Institute of Automation, University of Bremen, Germany.
Date of dissertation colloquium: 22 January 2010.
October 2000 - 30 September 2006: Faculty of Electrical Engineering and Computer Science, Transilvania University of Brasov, Diploma Engineer (graduated head of the 2006 promotion).
Research interests
Robust Machine Vision
Multiple Objects Tracking
3D Scene Reconstruction
Lectures
Computer Vision Systems
Control Structures in Machine Vision


Awards
2016: 2nd place at the ADAS Innovation Challenge Open (AICO) 2016.
2015: 2nd place at the Elektrobit Innovation Award for the work on "Deep Learning and Physics Perception".
2013: 1st place at the Elektrobit Innovation Award for the work on "Automotive and Drive Analytics".
2008: Best poster award at the Salzhausen Colloquium of Automation 2008, Salzhausen, Germany, for the paper "Robust Object Classification and Recognition in Service Robotics".
2006: Excellence diploma from the Romanian Society of Automation and Industrial Informatics (SRAIT) for graduating top of class in the field of Automation and Industrial Informatics and for the conducted research activity.
2006: 1st place at the Students Scientific Session, for the work "Pollution Guard – Air Pollution Monitoring and Warning System".
2005: 1st place at the Students Scientific Session, for the work "Synthesis of a neural command for controlling a 3-phase stepper motor using the DS80C420 microcontroller".
Publications
S.M. Grigorescu Robust Machine Vision for Service Robotics, Institute of Automation, University Bremen, Shaker-Verlag, Aachen, 2010.
Cosmin Ginerică, Mihai Zaha, Florin Gogianu, Lucian Busoniu, Bogdan Trăsnea, Sorin Grigorescu. “ObserveNet Control: A Vision-Dynamics Learning Approach to Predictive Control in Autonomous Vehicles”. IEEE Robotics and Automation Letters 2021
Bogdan Trăsnea, Cosmin Ginerică, Gigel Măceşanu, Claudiu Pozna, Sorin Grigorescu. “OctoPath: An OcTree-Based Self-Supervised Learning Approach to Local Trajectory Planning for Mobile Robots”. Sensors 2021 (11), 3606
Sorin Grigorescu, Mihai Zaha, Bogdan Trăsnea, Cosmin Ginerică. “Embedded Vision for Self-Driving on Forest Roads”. 2021 IEEE Computer Vision and Pattern Recognition conference (CVPR), Workshop on Embedded Vision.
Sorin Grigorescu, Cosmin Ginerică, Mihai Zaha, Gigel Măceşanu, Bogdan Trăsnea. “LVD-NMPC: A Learning-based Vision Dynamics Approach to Nonlinear Model Predictive Control for Autonomous Vehicles”. International Journal of Advanced Robotic Systems, 2021
Sorin Grigorescu (2021). “Vision dynamics-based learning control,”. Learning Control, Applications in Robotics and Complex Dynamical Systems 2021, Pages 243-257
Sorin Grigorescu, Tiberiu Cocias, Bogdan Trasnea, Andrea Margheri, Federico Lombardi and Leonardo Aniello. "Cloud2Edge Elastic AI Framework for Prototyping and Deployment of AI Inference Engines in Autonomous Vehicles". Sensors 2020, 20(19), 5450
M. Schleicher, S.M. Grigorescu, “How Neural Networks Change Automotive Software Development”, ATZ Elektron, Springer, no. 15, pp. 18–24, 2020.
Cocias, T., Razvant, A., & Grigorescu, S. (2020). “GFPNet: A Deep Network for Learning Shape Completion in Generic Fitted Primitives.”, arXiv preprint arXiv:2006.02098.
S. Grigorescu, B.Trasnea, T.T. Cocias, G. Macesanu, “A Survey of Deep Learning Techniques for Autonomous Driving”, Journal Of Field Robotics, DOI: 10.1002/rob.21918, 2019
S.M. Grigorescu T. Bogdan M. Liviu V. Andrei and C. Tiberiu "NeuroTrajectory: A Neuroevolutionary Approach to Local State Trajectory Learning for Autonomous Vehicles" IEEE Robotics and Automation Letters Oct. 2019
S.M. Grigorescu M. Glaab and J. Schlosse "KI für Selbstfahrende Autos (Artificial Intelligence for Self-Driving Cars)", EE Faszination Elektronic, 2017.
S.M. Grigorescu M. Glaab and A. Roßbach "From logistic regression to self-driving cars: Chances and challenges of using machine learning for highly automated driving", Elektrobit Automotive TechPaper, 2017.
S.M. Grigorescu and G. Macesanu "Human–Robot Interaction through Robust Gaze Following", Book series: Information Technology and Computational Physics. Advances in Intelligent Systems and Computing, Springer, vol. 462, ISBN 978-3-319-44259-4, pp 165-178, 2017.
S.M. Grigorescu and F. Moldoveanu "A Feedback Control Gaze Following Approach for Human-Robot Interaction", Memoirs of the Scientific Sections of the Romanian Academy, 2016.
G. Macesanu, F. Moldoveanu and S.M. Grigorescu "A Time-Delay Control Approach for a Stereo Vision Based Human-Machine Interaction System", Journal of Intelligent and Robotic Systems, Springer, 2013.
T.T. Cocias, F. Moldoveanu and S.M. Grigorescu "Generic Fitted Shapes (GFS): Volumetric Object Segmentation in Service Robotics", Robotics and Autonomous Systems, Elsevier, Netherlands, 2013.
S.M. Grigorescu and C. Pozna "Towards a Stable Robotic Object Manipulation through 2D-3D Features Tracking", International Journal of Advanced Robotic Systems, InTech, vol. 10, no. 200, pp. 1-8, 2013.
S.M. Grigorescu, G. Macesanu, T.T. Cocias, D. Puiu and F. Moldoveanu "Robust Camera Pose and Scene Structure Analysis for Service Robotics", Robotics and Autonomous Systems, Elsevier, Netherlands, vol. 59, no. 11, pp. 889-909, 2011.
S.M. Grigorescu, T. Lueth, C. Fragkopoulos, M. Cyriacks and A. Graeser "A BCI Controlled Robotic Assistant for Quadriplegic People in Domestic and Professional Life", ROBOTICA, Cambridge University Press, UK, 2011.
T.T. Cocias, S.M. Grigorescu, F. Moldoveanu "3D Structure Estimation from a Single View Using Generic Fitted Primitives (GFP)", Computer Vision, Imaging and Computer Graphics. Theory and Applications, Vol. 359, Springer Beriln Heidelberg, Germany, pp. 369-382, ISSN: 1868-0929, ISBN: 978-3-642-38240-6, 2011.
Natarajan, S., Grigorescu, S.M., Mronga, D. "Robust Detection and 3D Reconstruction of Boundary Segmented Objects in a Robotic Library Scenario", Methods and Applications in Automation, Shaker Verlag, Series 1, No. 3, 2010.
Grigorescu, S.M., Ristic-Durrant, D. "Robust Extraction of Object Features in the System FRIEND II", Methods and Applications in Automation, Shaker Verlag, Series 1, No. 2, pp. 97-107, ISBN 978-3-8322-7666-9, ISSN 1861-5457, 2008.
Csanád Sándor, Szabolcs Pavel, Wieser Erik, Andreea Blaga, Péter Boda, Andrea-Orsolya Fülöp, Adrian Ursache, Attila Zöld, Aniko Kopacz, Botond Lazar, Karoly Szabo, Zoltán Tasnádi, Botond Trinfa, Lehel Csato, Dan Marius Tegzes, Marian Leontin Pop, Raluca Alexandra Tarziu, Mihai-Valentin Zaha, Sorin Mihai Grigorescu, Lucian Busoniu, Paula Raica, Levente Tamas, “The ClujUAV student competition: A corridor navigation challenge with autonomous drones”, 21rst Int. Federation of Automatic Control World Congress IFAC, Berlin, Germany, 2020.
B. Trasnea, C.Pozna, S. Grigorescu, " AIBA: An AI Model for Behavior Arbitration in Autonomous Driving" Multi-disciplinary Trends in Artificial Intelligence, p.191, DOI: 10.1007/978-3-030-33709-4
S.M. Grigorescu "Generative One-Shot Learning (GOL): A Semi-Parametric Approach to One-Shot Learning in Autonomous Vision", Int. Conf. on Robotics and Automation ICRA 2018, Brisbane, Australia, May 21-25, 2018.
B. Trasnea, G. Macesanu, S.M. Grigorescu and T. Cocias, "Smartphone Based Mass Traffic Sign Recognition for Real-time Navigation Maps Enhancement" Int. Conf. on Optimization of Electrical and Electronic Equipment, Brasov, Romania, 25-27 May 2017.
L. Marina, F. Moldoveanu and S.M. Grigorescu "Environment perception in racing simulators using deep neural networks", Int. Conf. on Optimization of Electrical and Electronic Equipment, Brasov, Romania, May 25-27, 2017.
S.M. Grigorescu and G. Măceşanu, "Human-Robot Interaction through Robust Gaze Following," Congress on Information Technology, Computational and Experimental Physics CITCEP 2015, Cracow, Poland, December 18-20, 2015.
T.T. Cocias, F. Moldoveanu and S.M. Grigorescu "Generic Fitted Primitives (GFP): Towards Full Object Volumetric Reconstruction for Service Robotics", Proceedings of the 21st Int. Conf. in Central Europe on Computer Graphics, Visualization and Computer Vision, Plzen, Czech Republic, June 24-27, 2013.
S.M. Grigorescu, D. Pangercic and M. Beetz "2D-3D Collaborative Tracking (23CT): Towards Stable Robotic Manipulation", Proceedings of the 2012 IEEE-RSJ International Conference on Intelligent RObots and Systems IROS, Workshop on Active Semantic Perception, Vilamoura, Algarve, Portugal, October 7-12, 2012.
G. Macesanu, S.M. Grigorescu, J.F. Ferreira, J. Dias and F. Moldoveanu, "Real Time Facial Features Tracking using an Active Vision System," 13th International Conference on Optimization of Electrical and Electronic Equipment, Brasov, Romania, 24-26 May 2012, pp. 1493-1498.
S.M. Grigorescu, G. Macesanu, C. Tiberiu and F. Moldoveanu "Stereo Vision-based 3D Camera Pose and Object Structure Estimation: An Application to Service Robotics", Proceedings of the International Conference on Computer Vision Theory and Applications, Rome, Italy, February 24 - 26, 2012.
T.T. Cocias, S.M. Grigorescu and F. Moldoveanu "Object Volumetric Estimation Based on Generic Fitted Primitives for Service Robotics", Proceedings of the International Conference on Computer Vision Theory and Applications, Rome, Italy, February 24 - 26, 2012.
T.T. Cociaș, S.M. Grigorescu and F. Moldoveanu, "Multiple-Superquadrics based Object Surface Estimation for Grasping in Service Robotics," 13th International Conference on Optimization of Electrical and Electronic Equipment, Brasov, Romania, 24-26 May 2012, pp. 1471-1477.
T.T. Cociaș, S.M. Grigorescu and F. Moldoveanu, "3DOR based Global Pose Estimation for Service Robotics," Fifth Győr Symposium & First Hungarian-Polish Joint Conference On Computational Intelligence, Győr, Hungary, 2012.
G. Macesanu, S.M. Grigorescu and F. Moldoveanu, "On Facial Features Tracking using an Active Stereo Camera Control Approach," Fifth Győr Symposium & First Hungarian-Polish Joint Conference On Computational Intelligence, Győr, Hungary, 2012.
T.T. Cocias, S.M. Grigorescu and F. Moldoveanu "On Performance Evaluation of 3D Scene Reconstruction Systems", Proceedings of the 20th Int. Workshop on Robotics in Alpe-Adria-Danube Region, Brno, Czech Republic, October 5 - 7, 2011.
G. Macesanu, S.M. Grigorescu and F. Moldoveanu "An Active Stereo Vision Control System Based on PTZ Cameras for Robust Robotic Perception", Proceedings of the 20th Int. Workshop on Robotics in Alpe-Adria-Danube Region, Brno, Czech Republic, October 5 - 7, 2011.
S.M. Grigorescu, G. Macesanu, C. Tiberiu and F. Moldoveanu "On the Real-time Modelling of a Robotic Scene Perception and Estimation System", Proceedings of the 15th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, October 14 - 16, 2011.
G. Macesanu, S.M. Grigorescu and V. Comnac "Time-delay Analysis of a Robotic Stereo Active Vision System", Proceedings of the 15th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, October 14 - 16, 2011.
S.M. Grigorescu and F. Moldoveanu "Controlling Depth Estimation for Robust Robotic Perception", Proceedings of the 18th IFAC World Congress, Milano, Italy, August 28 - September 2, 2011.
C.N. Boldisor, V. Comnac, S. Coman and S.M. Grigorescu "A Combined Experience and Model Based Design Methodology of a Fuzzy Control System for Mean Arterial Pressure and Cardiac Output", Proceedings of the 18th IFAC World Congress, Milano, Italy, August 28 - September 2, 2011.
Grigorescu, S.M., Graeser, A. "Robust Machine Vision for Complex Service Robotic Systems" (invited paper), Proceedings of the X Triennial International SAUM Conference on Systems, Automatic Control and Measurements, Nis, Serbia, November 10-12, 2010.
Grigorescu, S.M., Natarajan, S., Mronga, D., Graeser, A. "Robust Feature Extraction for 3D Reconstruction of Boundary Segmented Objects in a Robotic Library Scenario", Proceedings of the 2010 IEEE-RSJ International Conference on Intelligent RObots and Systems IROS, Taipei, Taiwan, October 18-22, 2010.
Grigorescu, S.M., Graeser, A. "Model Driven Developed Machine Vision System for Service Robotics", Proceedings of the 12th International Conference on Optimization of Electrical and Electronic Equipments - OPTIM 2010, pp. 877-883, Brasov, Romania, May 20-22, 2010.
Tschakarow, R., Grigorescu, S.M., Graeser, A. "FRIEND - a Dependable Semiautonomous Rehabilitation Robot", Proceedings of the Joint 41th International Symposium on Robotics and 6th German Conference on Robotics, pp. 327-378, Munich, Germany, June 07-09, 2010.
Heyer, T., Grigorescu, S.M., Graeser, A. "Camera Calibration for Reliable Object Manipulation in Care-providing System FRIEND", Proceedings of the Joint 41th International Symposium on Robotics and 6th German Conference on Robotics, pp. 446-451, Munich, Germany, June 07-09, 2010.
Grigorescu, S.M., Ristic-Durrant, D., Graeser, A. "RObust machine VIsion for Service robotic system FRIEND", Proceedings of the 2009 IEEE-RSJ International Conference on Intelligent RObots and Systems IROS, St. Louis, USA, October 10-15, Tome II, pp. 3574-3581, ISBN 978-1-4244-3803-7, DOI: 10.1109/IROS.2009.5354596, 2009.
Grigorescu, S.M., Ristic-Durrant, D., Vupalla, S.K. Graeser, A. "Closed-Loop Control in Image Processing for Improvement of Object Recognition", Proceedings of the 17th IFAC World Congress, Seoul, Korea, July 06-11, ISBN: 978-3-902661-00-5, DOI: 10.3182/20080706-5-KR-1001.2132, 2008.
Grigorescu, S.M., Graeser, A. "Robust Machine Vision Framework for Localization of Unknown Objects", Proceedings of the 11th International Conference on Optimization of Electrical and Electronic Equipments OPTIM 2008, Brasov, Romania, May 22-23, 2008, Vol. III, pp. 127-130, ISBN 978-1-4244-1544-1, DOI: 10.1109/OPTIM.2008.4602468 (IEEE Cat. No.: 08EX1996, Library of Congress: 2007905111), 2008.
Vuppala, S.K., Grigorescu, S.M., Ristic-Durrant, D., Graeser, A. "Robust Color Object Recognition for a Service Robotic Task in the System", Proceedings of the 10th IEEE International Conference on Rehabilitation Robotics 2007, Noordwijk, Netherlands, June 13-15, 2007, pp. 704-713, ISBN 978-1-4244-1320-1, DOI: 10.1109/ICORR.2007.4428503 (IEEE Xplore, INSPEC Accession No.: 9813131), 2007.
Suciu, C., Moldoveanu, F., Campeanu, R., Baciu, I., Grigorescu, S. M., Carstea, B., Voinea, V. "GPRS Based System for Atmospheric Pollution Monitoring and Warning", Proceedings of the 2006 IEEE-TTTC International Conference on Automation, Quality & Testing, Robotics AQTR 2006, Cluj-Napoca, Romania, May 25-28, 2006, Tome II, pp.193-198, ISBN 1-4244-0360-X (IEEE Cat. No.: 06EX1370, Library of Congress: 2006924077, IEEE Xplore INSPEC Accession Number: 9175432), 2006.
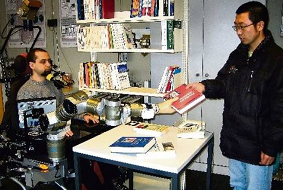
Mobile manipulation with the FRIEND robot
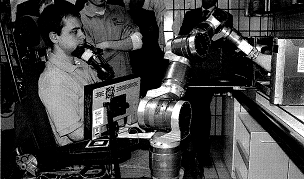
A sample of my brainwaves taken within the FRIEND project
